| 23 Mar 2020
| 23 Mar 2020
Brief communication: A fast vortex-based smearing correction for the actuator line
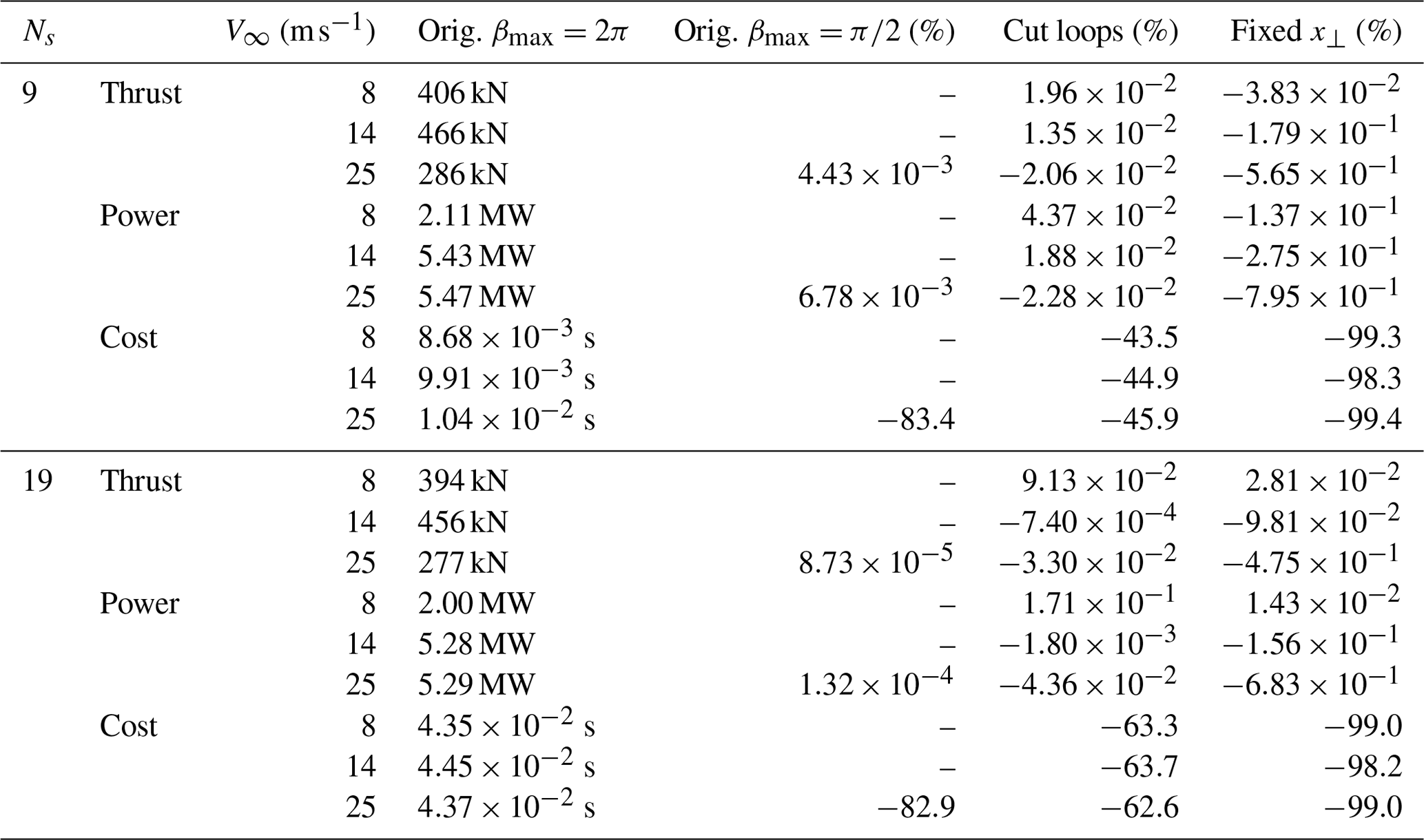
The actuator line is a lifting line representation of aerodynamic surfaces in computational fluid dynamics applications but with non-singular forces, which reduces the self-induced velocities at the line. The vortex-based correction by Meyer Forsting et al. (2019a) recovers this missing induction and thus the intended lifting line behaviour of the actuator line. However, its computational cost exceeds that of existing tip corrections and quickly grows with blade discretization. Here we present different methods for reducing its computational cost to the level of existing corrections without jeopardizing the stability or accuracy of the original method. The cost is reduced by at least 98 %, whereas the power is maximally affected by 0.8 % with respect to the original formulation. This accelerated smearing correction remains a dynamic correction by modelling the variation in trailed vorticity over time. The correction is openly available (Meyer Forsting et al., 2019b).