| 21 Feb 2025
| 21 Feb 2025
Glauert's optimum rotor disk revisited – a calculus of variations solution and exact integrals for thrust and bending moment coefficients
Editorial note
The Editorial Board of Wind Energy Science (WES) has reviewed the article Tyagi and Schmitz (2025), concerning its similarities with a previously published non-peer-reviewed student conference paper by the same authors: Tyagi and Schmitz (2024).
Following a thorough assessment, we have confirmed that the technical content of the two papers is substantially the same. The WES article reconstructs the presentation of the material from the earlier conference version, but does not introduce new material, as was intended by the WES publication guidelines, which require "significant novelty" for an expanded journal version of a conference paper. Also, the WES article did not cite or acknowledge the existence of the prior 2024 conference paper at the time of submission.
The journal does not intend to publish restructured work as a new publication, even if it is a significant improvement of the original. However, it is perhaps understandable that there could be ambiguity in the implications of the "significant novelty" requirement.
After careful consideration, the Editorial Board has decided not to retract the article on the belief that the journal needs to define the requirements more clearly. We believe that retracting the article at this point would stifle valuable scientific dialogue, which continues to unfold in both technical and public domains.
To avoid similar situations happening again, we have now updated the requirements for submissions that expand conference proceedings. The new guidelines are available on the journal portal at the pages publication ethics and general terms. Clearer instructions have also been added to the manuscript submission form.
Since its publication, the paper has received considerable attention in mainstream media and non-technical outlets (e.g., Sliman 2025, Dubois 2025, among others). Some of these reports have extrapolated the findings of the article and made claims that are not included in the actual content of the WES publication.
This was brought to our attention through a peer-reviewed comment by Leishman (2025), which has been posted online and is now under review. This response aims to clarify the actual technical contributions of Tyagi and Schmitz (2025) and distinguish them from interpretations seen in the media.
We hope the ensuing dialogue on this paper will promote a more transparent and informed discussion of the original work and its implications.
The Editorial Board of Wind Energy Science
References
Tyagi, D. and Schmitz, S.: Glauert’s optimum rotor disk revisited – a calculus of variations solution and exact integrals for thrust and bending moment coefficients, Wind Energ. Sci., 10, 451–460, https://doi.org/10.5194/wes-10-451-2025, 2025.
Tyagi, D. and Schmitz, S.: Amendment to Glauert’s optimum rotor disk solution, AIAA Regional Student Conferences, Region I - North East, AIAA 2024-84552, https://arc.aiaa.org/doi/pdf/10.2514/6.2024-84552, 13 April 2024.
Sliman, K.: Student refines 100-year-old math problem, expanding wind energy possibilities, Penn State News, https://news.engr.psu.edu/2025/schmitz-sven-wind-energy-math-problem.aspx, 21 February 2025 (accessed 17 August 2025).
Dubois, J.: Penn State student solved a 100-year-old math problem that could transform wind energy forever, MSN, https://www.msn.com/en-us/news/other/penn-state-student-solved-a-100-year-old-math-problem-that-could-transform-wind-energy-forever/, 22 July 2025 (accessed 17 August 2025).
Leishman, J. G.: Comment on "Glauert's optimum rotor disk revisited – a calculus of variations solution and exact integrals for thrust and bending moment coefficients" by Tyagi and Schmitz (2025), Wind Energ. Sci. Discussions [preprint], https://doi.org/10.5194/wes-2025-105, in review, 2025.
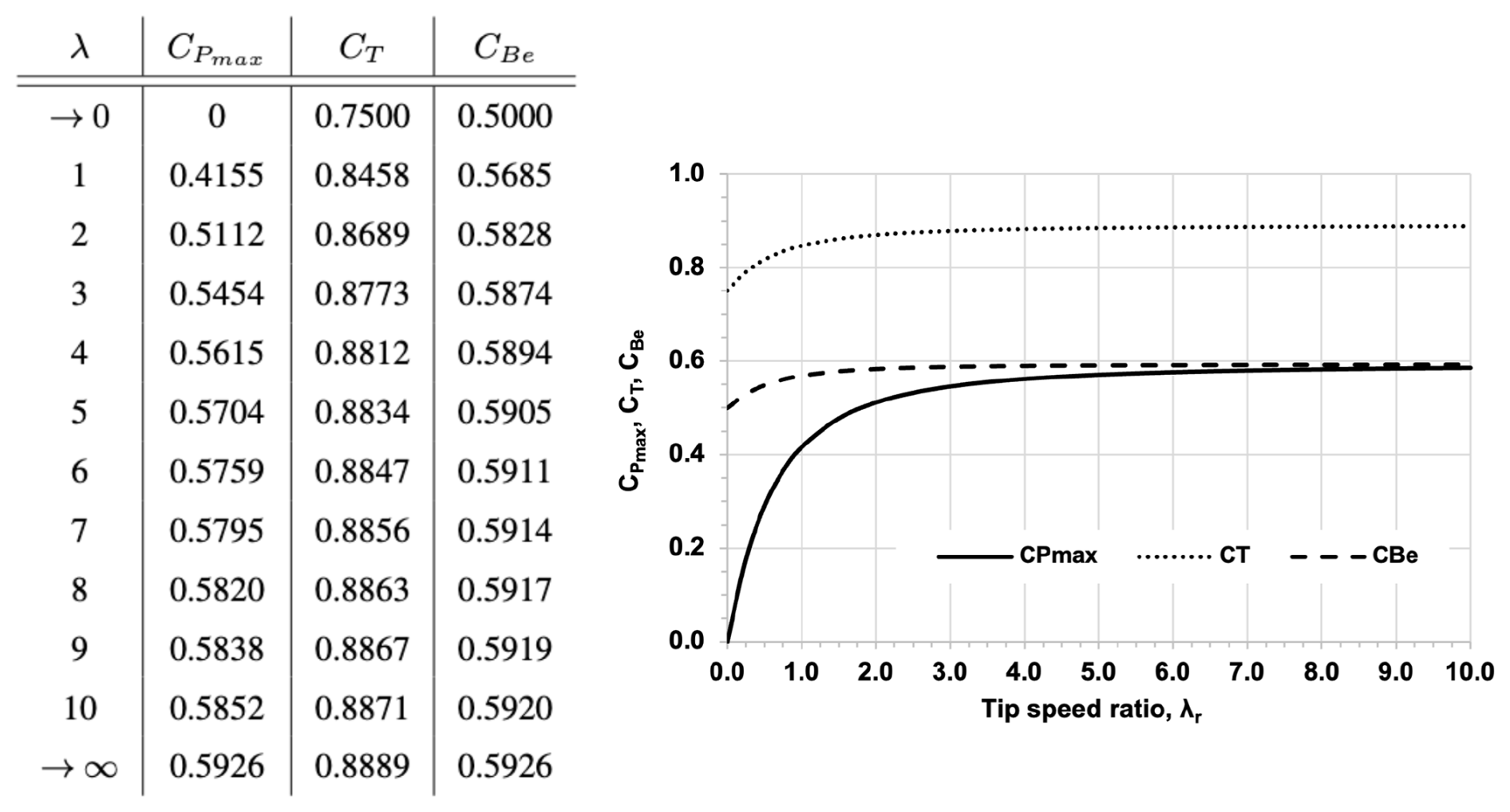
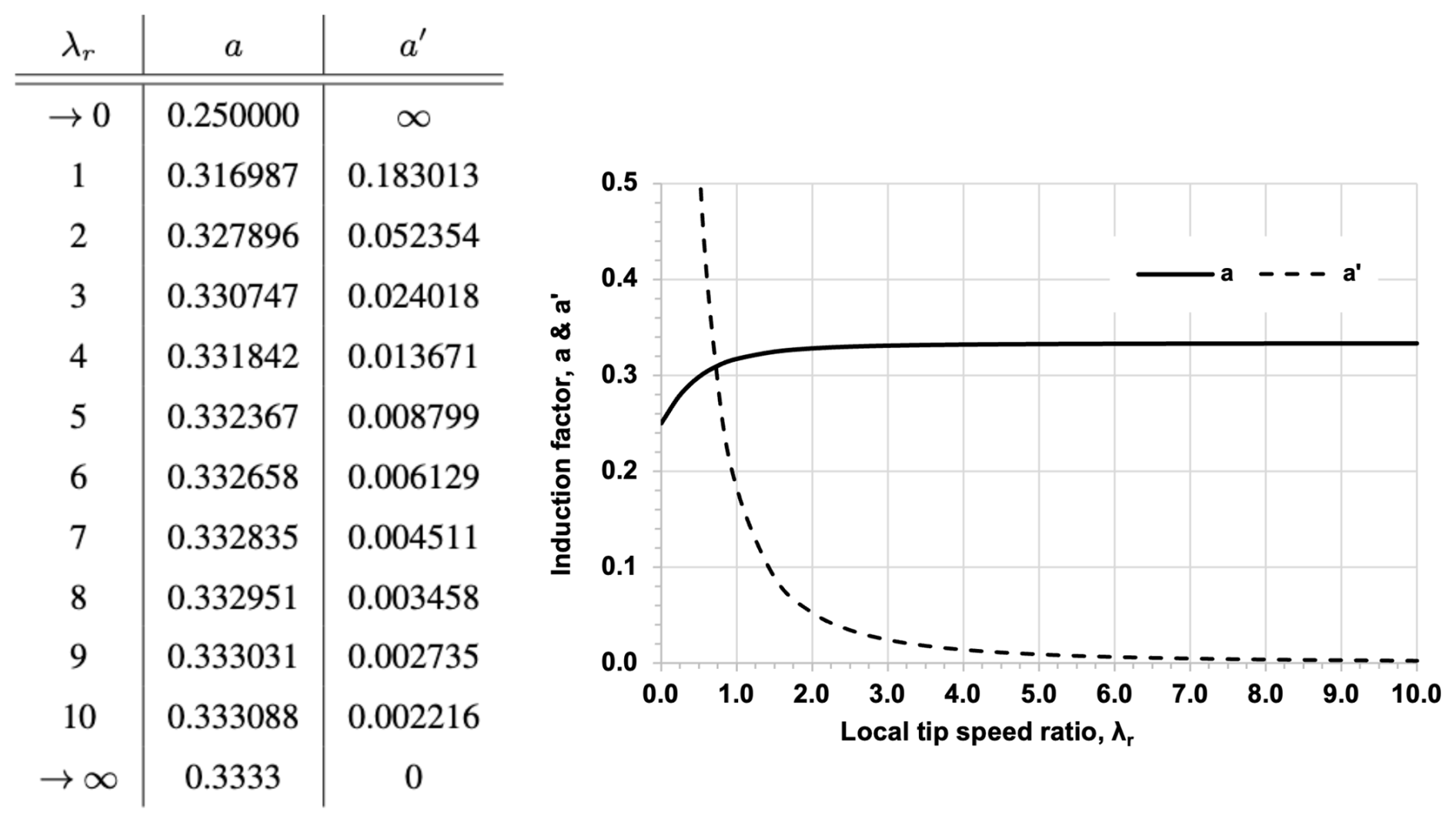
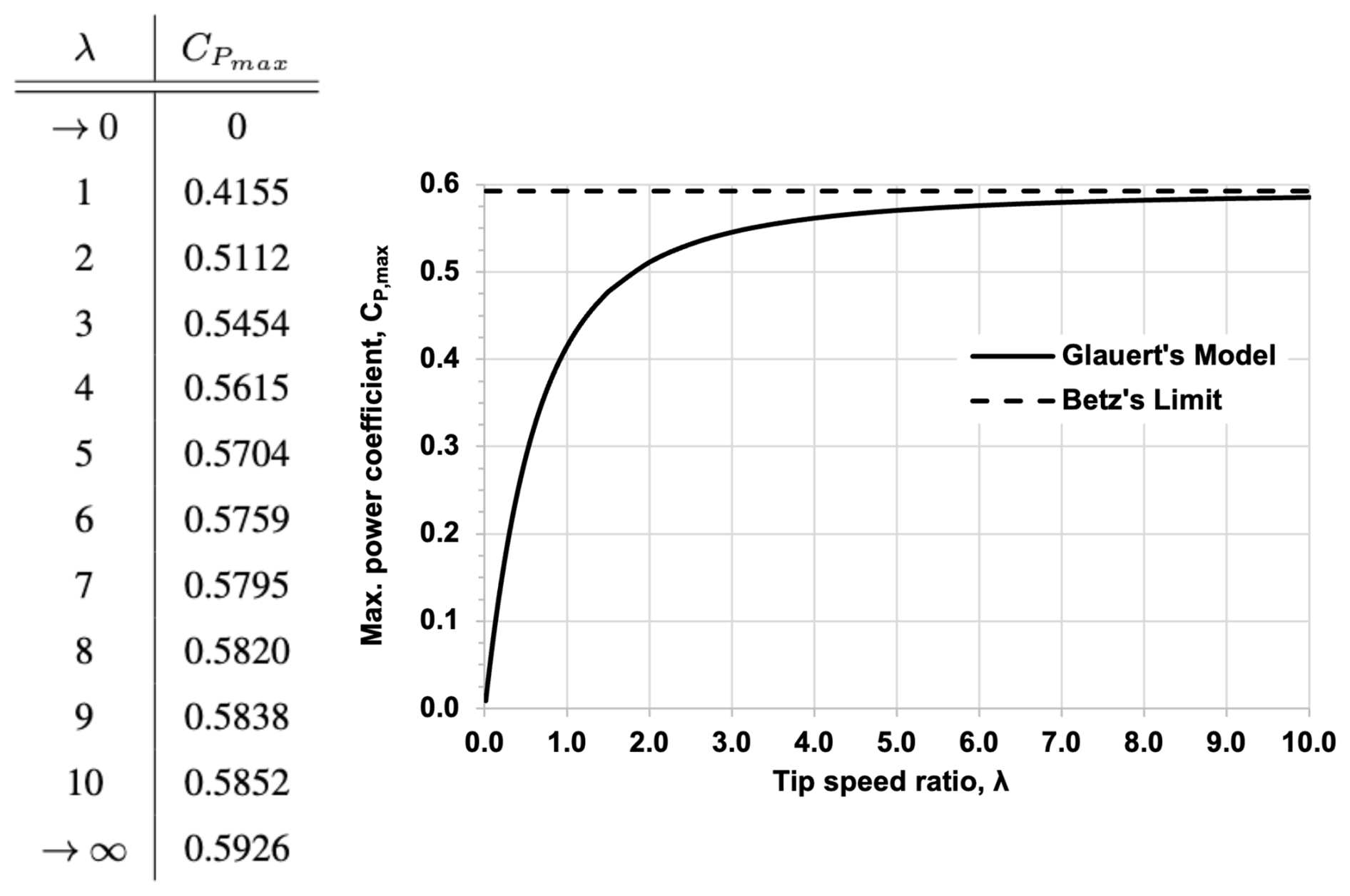
The present work is an amendment to Glauert's optimum rotor disk solution for the maximum power coefficient, , as a function of tip speed ratio, λ. First, an alternate mathematical approach is pursued towards the optimization problem by means of calculus of variations. Secondly, analytical solutions for thrust and bending moment coefficients, CT and CBe, are derived, where an interesting characteristic is revealed pertaining to their asymptotic behavior for λ→∞. In addition, the limit case of the non-rotating actuator disk for λ→0 is shown for all three performance coefficients by repeated use of L'Hôpital's theorem, and its validity is discussed in the context of other works since Glauert.